
There’s a good chance that in the next decade, autonomous vehicles (AVs) will navigate the streets around Lehigh’s campus in South Bethlehem.
According to a recent report from market and consumer data company Statista, industry forecasts predict that by 2030, one in every 10 new vehicles produced globally will be fully automated.
For now, “going driverless” on Morton Street or up to the Mountaintop Campus is possible through simulations being developed as part of a Mountaintop Project focused on testing and improving the reliability of AVs.
 Cristian-Ioan Vasile, an assistant professor of mechanical engineering and mechanics, launched the project in Summer 2020 and serves as faculty mentor.
Cristian-Ioan Vasile, an assistant professor of mechanical engineering and mechanics, launched the project in Summer 2020 and serves as faculty mentor.
Through the Mountaintop Project program, faculty and students work together as partners and co-creators to produce impactful research on a wide variety of topics. This past summer, topics ranged from designing renewable energy solutions for a developing nation to the use of virtual reality in reducing racial biases to paving the way for smarter and safer autonomous vehicles.
“Self-driving cars are a hot topic, but understanding where we need to innovate, and the challenges that we need to overcome goes a long way toward redefining transportation in terms of mobility and accessibility,” says Vasile, who also has a courtesy appointment in the computer science and engineering department.
There’s a rising need for engineers and programmers to further develop the safety of AVs, he says, and the project gives students the opportunity to partner with Vasile to study how the technology can be translated into more secure and accessible transportation in the future.
That’s accomplished by combining two approaches: a computer simulation framework that facilitates large-scale experiments and a small-scale physical testbed that provides a more realistic experience with sensors and conditions such as noise and uncertainty.
Computer science majors Brian Zhu ’22 and Diep Luong ’24, along with electrical engineering major Declan Coster ’23, are among the undergraduates who have joined the “Testbed for Self-Driving Cars in Urban Environments with Traffic” team as a way to get acquainted with the field.
“It’s really cool that this research is being done entirely by undergraduates,” Coster says. “First-year students and upperclassmen with different skill sets and majors have been able to collaborate and tackle problems together—it’s special to have the opportunity to work with people from such diverse backgrounds.”
The goal is to build a physical testbed for investigating how intersections, roundabouts, distracted or aggressive drivers, and other sources of “complex behavior” in urban settings affect the decision-making capabilities of AVs.
With the help of software, team members are able to create, deploy, and collect data on larger scales through simulations portraying cities, like Bethlehem, that are more difficult to re-create in the available laboratory space the team has.
Team members are tasked with designing this urban environment (with buildings, roads, signs, lights, markings, etc.) through simulations based on road maps of Bethlehem and Lehigh’s campus.
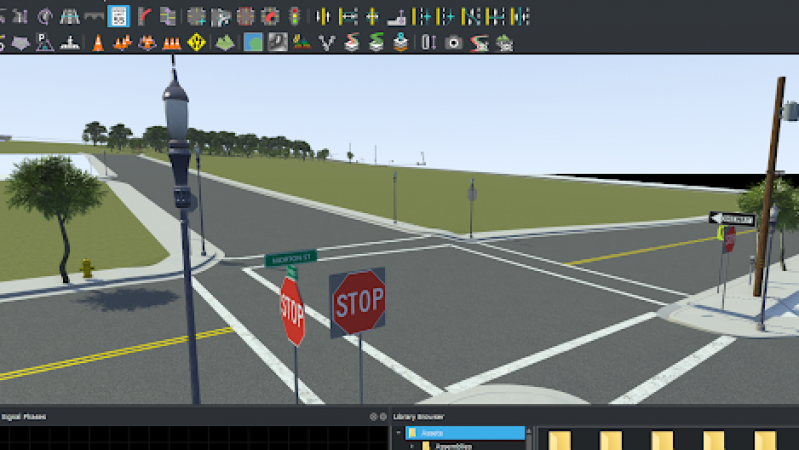
Through these simulations, the self-driving vehicles take shape as miniature race cars with a standard sensor and computational setup. Based on these tests, the team will analyze how autonomous vehicles navigate such complex environments and use that information to design software to improve the ability of AVs to navigate these types of landscapes.
Vasile says access to new hardware and software technologies has helped the students move the project forward.
For example, he points to CARLA, a free, open-source, photorealistic simulator for autonomous driving research, that was created in 2017. This simulator offers researchers realistic urban environments with different weather and lighting conditions and vehicle features such as GPS, LIDAR cameras, and real-time data acquisition to test algorithms for AVs.
Without these technologies, Vasile says, the students would likely be spending most of their time developing their own systems.
“These tools are the product of our community efforts,” he says. “Thousands of people have been contributing directly to the development of these tools, making them much more useful than if they were developed in a small research lab.”
The project began during the peak of online learning, and the pandemic continued to introduce challenges this past summer.
Luong, who is an international student, joined the project in June 2021 and was tasked with optimizing the accuracy of the self-driving car’s traffic sign detection system. But she was unable to travel from her home in Vietnam to Bethlehem.
“I wanted to work with my friends, but I couldn’t go in person,” Luong says. “I just worked in my room most of the time.”
Now, students are back on campus and able to meet face-to-face with their team members, work in a lab space, and see the results of their efforts take shape through their hardware designs.
What continues to challenge them is the need to independently navigate and solve large problems within the course of their research.
“Research is not like a class where the professor has all of the answers and there’s an exact solution that you need to look for,” Zhu says. “It’s a lot more open-ended and the creativity and amount of options can be really overwhelming. You have to explore and experiment—it’s a different skill set.”
Based on this experience, Zhu recognizes the importance of collaboration. Learning from others and listening to team members’ ideas, he says, can make a difference when they are stuck on a problem.
“There are so many moving parts to any project that is of decent complexity, and rather than trying to be one person who can know everything and do everything yourself, collaboration is not just important, but it’s necessary,” Zhu says.
The struggles are real, but seeing their project progress is rewarding.
“With the problems you do in class, if you get it right, it’s just a number on a piece of paper,” Coster says, “Working on the programs in the lab, you actually get to see your code functionally work. Getting the car to move when you hit the right button—you see the progress that you’re making.”
Moving forward, team members are continuing to test autonomous vehicles’ behavior to analyze the risk around self-driving cars. In doing so, they hope to join their available software with their hardware platforms, build higher level capabilities, and eventually publish a research paper.
While students involved in the project agree that they have applied much of what they’ve learned from classes to their research, the research itself has created opportunities to learn more about topics such as control, perception, and simulation.
By working with software and hardware, students are learning how to independently tackle problems they find in their research, while also collaborating with one another to work efficiently as a team.
Vasile says there are plenty of opportunities for students interested in AV technology to get involved in the ongoing project.
“In engineering, we still have under-representation of women, minorities, and members of the LGBTQ+ community,” Vasile says. “I want to encourage every student to get involved with this project if they’re interested in it.
—Deirdre Kelshaw ’22 is a student writer for the P.C. Rossin College of Engineering and Applied Science